深圳市創研數字通訊有限公司
聯系人:羅先生
手機:13692246378
電話:0755-85299996
郵箱:lokiqi@qq.com
網址:http://fm1062.cn
地址:深圳寶安35區東方鼎泰文創科技園212


深圳市創研數字通訊有限公司
聯系人:羅先生
手機:13692246378
電話:0755-85299996
郵箱:lokiqi@qq.com
網址:http://fm1062.cn
地址:深圳寶安35區東方鼎泰文創科技園212

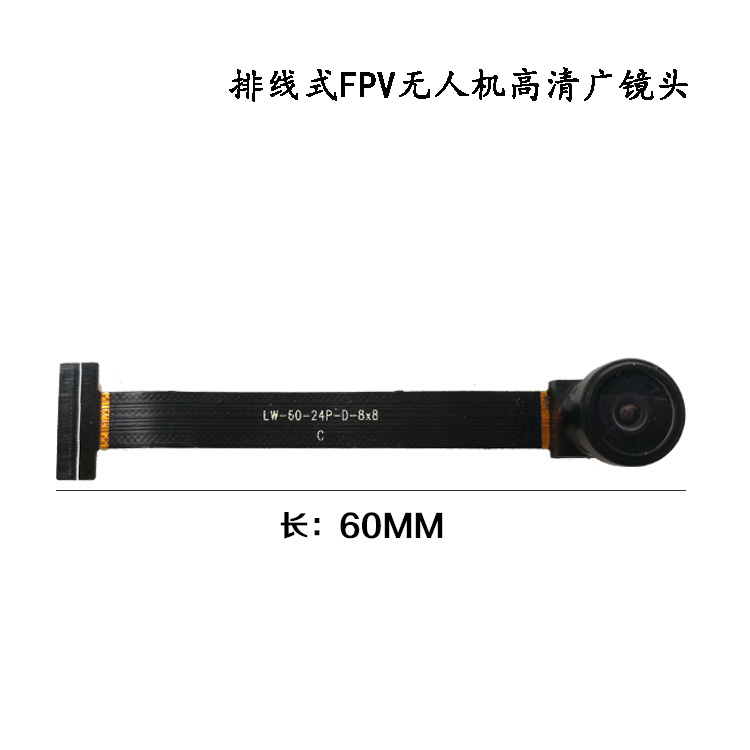
創研數字 IDC-WIFI720 迷你無人機圖系統方案模組:
蘋果機APP下載地址:HTTPS://FIR.IM/IWFS
安卓機APP下載地址:HTTPS://FIR.IM/AWFS
如有沒說明白的地方,請CALL客服哦!


手機對拍的,實際較果好很多!


WIFI通用飛控協議:批量開發定制,技術對接!13652345029
串口發送數據格式(串口波特率19200,1個啟始位,1個停止位,其它無):
發送間隔40MS,一次發送8個BYTE,
BYTE[0]:數據頭,固定為0X66
速度為30%時,(副翼,升降舵)0x5A-0x80-0xA6線性變化
速度為60%時,(副翼,升降舵)0x33-0x80-0xCD線性變化
速度為100%時,(副翼,升降舵)0x00-0x80-0xFF線性變化
BYTE[1]:AIL——副翼: 中間值0x80,左邊最大為0x00,右邊最大為0xff,即0x00-0x80-0xff線性變化
BYTE[2]:ELE——升降舵:中間值0x80,后最大為0x00,前最大為0xff,即0x00-0x80-0xff線性變化
BYTE[3]:THR——油門:0x00為最小,0xff為最大
(微調說明:前后/側飛:±24步 步進1 128+偏移量,每次重啟后回歸默認值128);
油門在沒有開啟定高模式的時候,就是0,開啟定調模式后是居中
BYTE[4]:RUDD——方向舵 中間值0x80,左轉最大為0x00,右轉最大為0xff,即0x00-0x80-0xff線性變化
(微調說明:±24步 步進2 中值定義: 128+偏移量,每次重啟后回歸默認值128);
為了避免加減油門時,對此字節指令產生影響,所以在圓形操控區域的中間1/6,因保持80H不變,此區域外按上述線性變化。
BYTE[5]:標志位
BYTE[6]=(BYTE[1]^BYTE[2]^BYTE[3]^BYTE[4]^BYTE[5])&0xff;
BYTE[7]:數據尾,固定為0x99
BYTE[5]
bit0=一鍵起飛 先置1,1秒后置0默認為0
bit1=一鍵下降 先置1,1秒后置0默認為0
bit2=緊急停止 每次點擊取反默認為0
油門低于40%時按緊急停止鍵無效,方向前后控制超過50%后,將bit2置0,(左右方向控制時,正常將bit2取反),按一鍵下降后,將bit2置0,油門控制時將bit2置0
bit3=一鍵固定方向翻轉 (原來沒有這個)
bit4=1 無頭模式 0有頭模式 默認為0
bit5=一鍵翻轉 點擊后置1,當方向鍵移動超過一半時,清0
當翻滾按鍵按下,并且方向鍵移動超過一半,發送1,并且方向值發最大值(最小值) 持續時間大概300毫秒,
bit6=光控制 默認燈光開
bit7=飛控陀螺儀矯正 先置1,1秒后置0
注:一鍵返航,360°翻轉,飛行軌跡這三個按鈕的優先級可以做成先入為主的方式(即先選擇哪個生效,在這個在執行過程沒有取消的情況下,其它兩個不生效),但必須保證任何時刻這三個只能是一個生效,不能同時生效。





 網站首頁
網站首頁 關于我們
關于我們 產品中心
產品中心 聯系我們
聯系我們

 淘寶旺旺
淘寶旺旺

